![]() Safety Voting Logic Explained Simply (SIS / ESD Systems)
Safety Voting Logic Explained Simply (SIS / ESD Systems)
In safety systems, voting logic determines when a shutdown should occur based on signals from multiple sensors.
The goal is to balance Safety and Plant Availability ![]() .
.
Here are the common voting logics used in industry ![]()
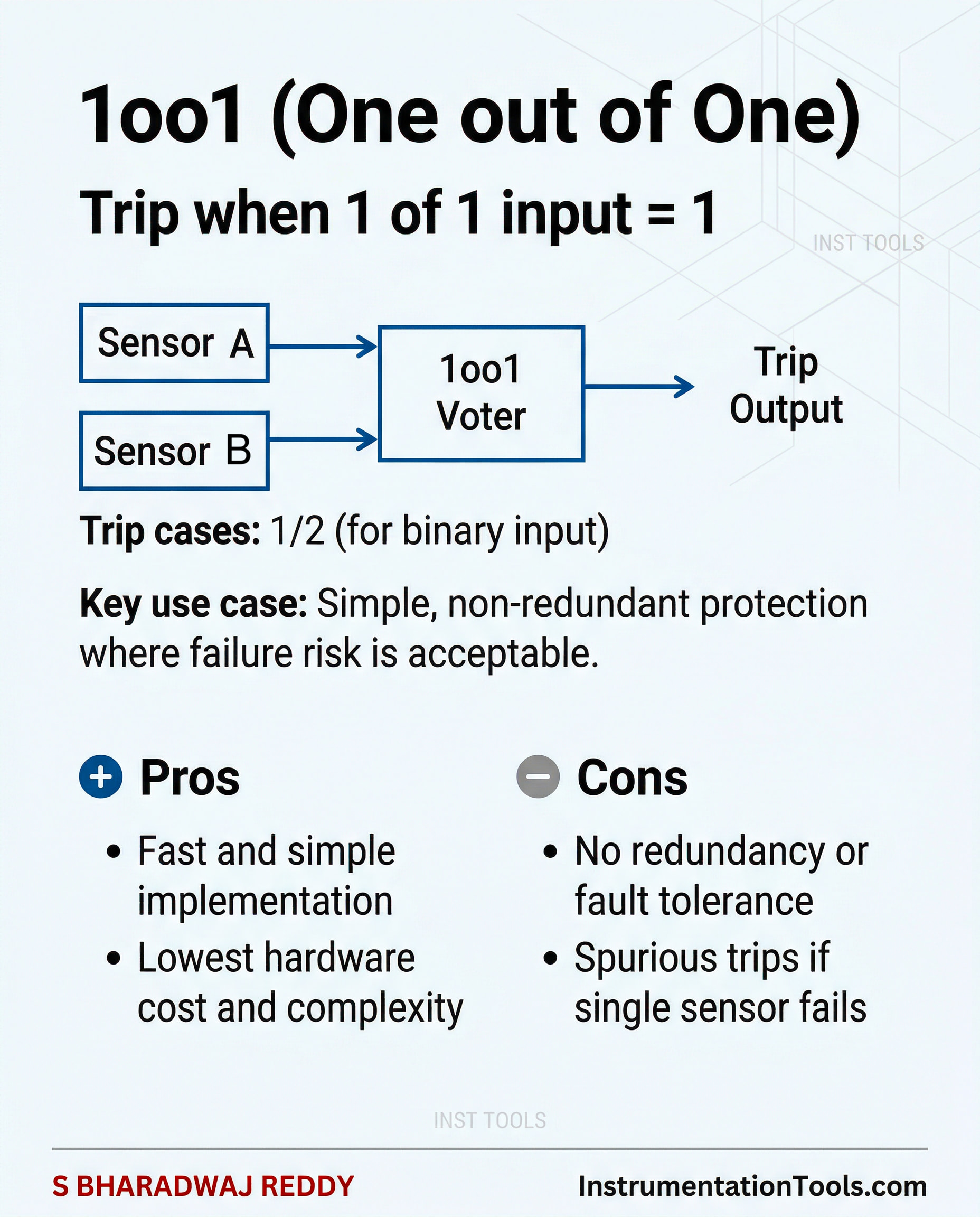
![]() #1oo1 Voting Logic (One out of One)
#1oo1 Voting Logic (One out of One)
![]() Trip occurs if 1 sensor detects danger
Trip occurs if 1 sensor detects danger
![]() Fastest response
Fastest response
![]() No redundancy
No redundancy
![]() Sensor failure can cause false trip
Sensor failure can cause false trip
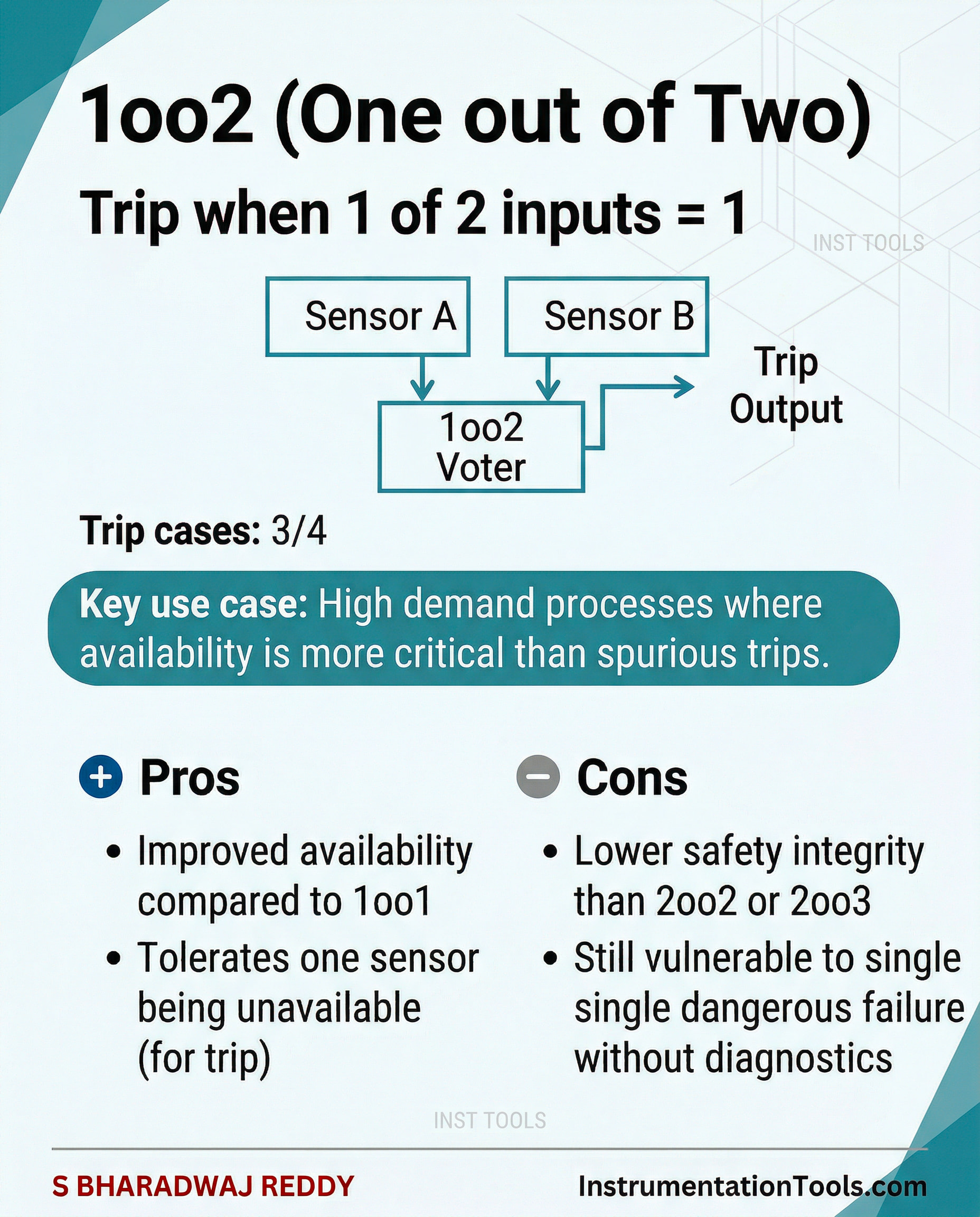
![]() #1oo2 Voting Logic (One out of Two)
#1oo2 Voting Logic (One out of Two)
![]() Trip occurs if any one of two sensors trips
Trip occurs if any one of two sensors trips
![]() Very sensitive protection
Very sensitive protection
![]() Higher nuisance trip possibility
Higher nuisance trip possibility
![]() Detects hazards quickly
Detects hazards quickly
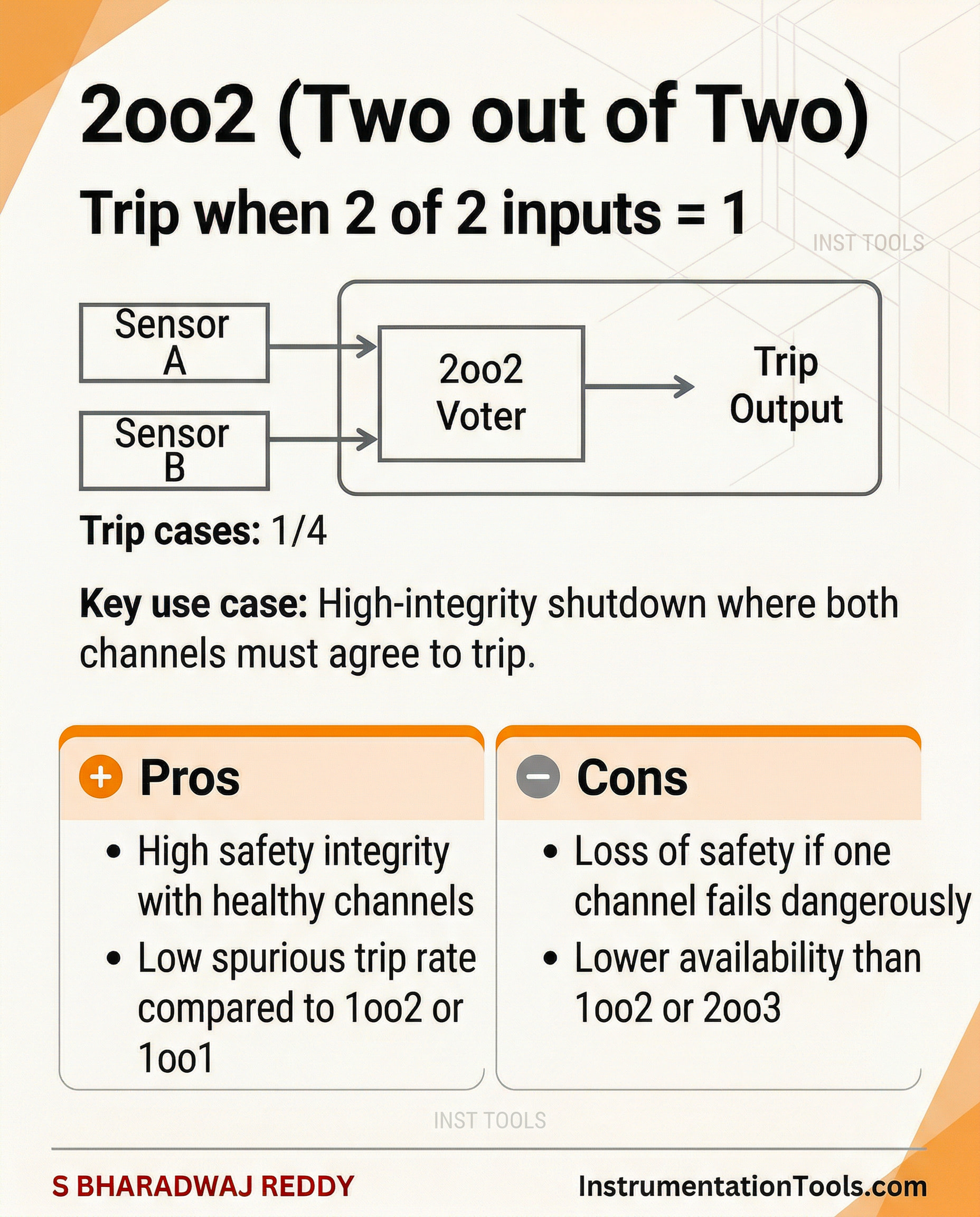
![]() #2oo2 Voting Logic (Two out of Two)
#2oo2 Voting Logic (Two out of Two)
![]() Both sensors must trip
Both sensors must trip
![]() Reduces false trips
Reduces false trips
![]() More reliable decision
More reliable decision
![]() Slightly slower protection
Slightly slower protection
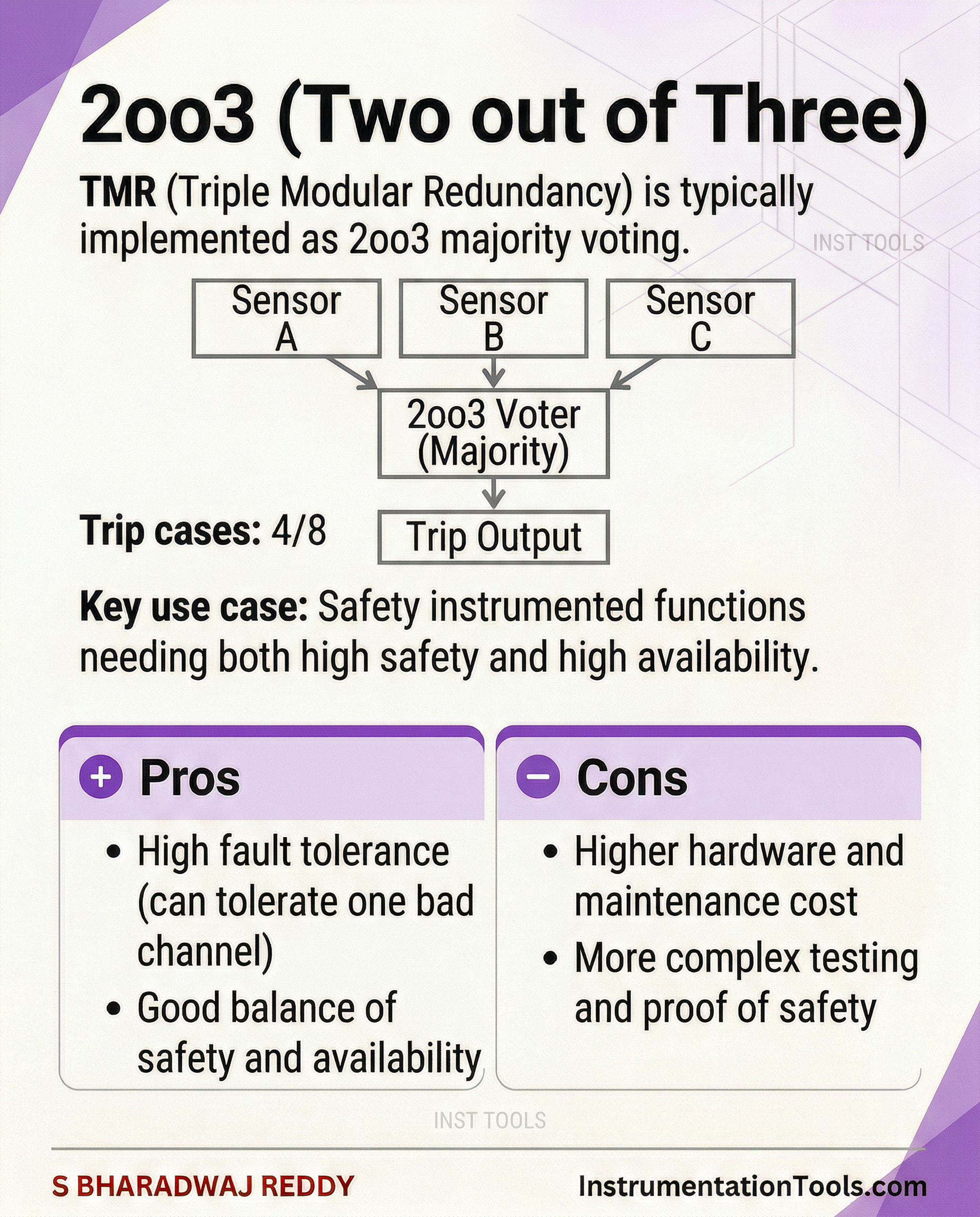
![]() #2oo3 Voting Logic (Two out of Three)
#2oo3 Voting Logic (Two out of Three)
![]() Any two sensors out of three must trip
Any two sensors out of three must trip
![]() Best balance of safety & availability
Best balance of safety & availability
![]() Can tolerate one faulty sensor
Can tolerate one faulty sensor
![]() Widely used in critical processes
Widely used in critical processes
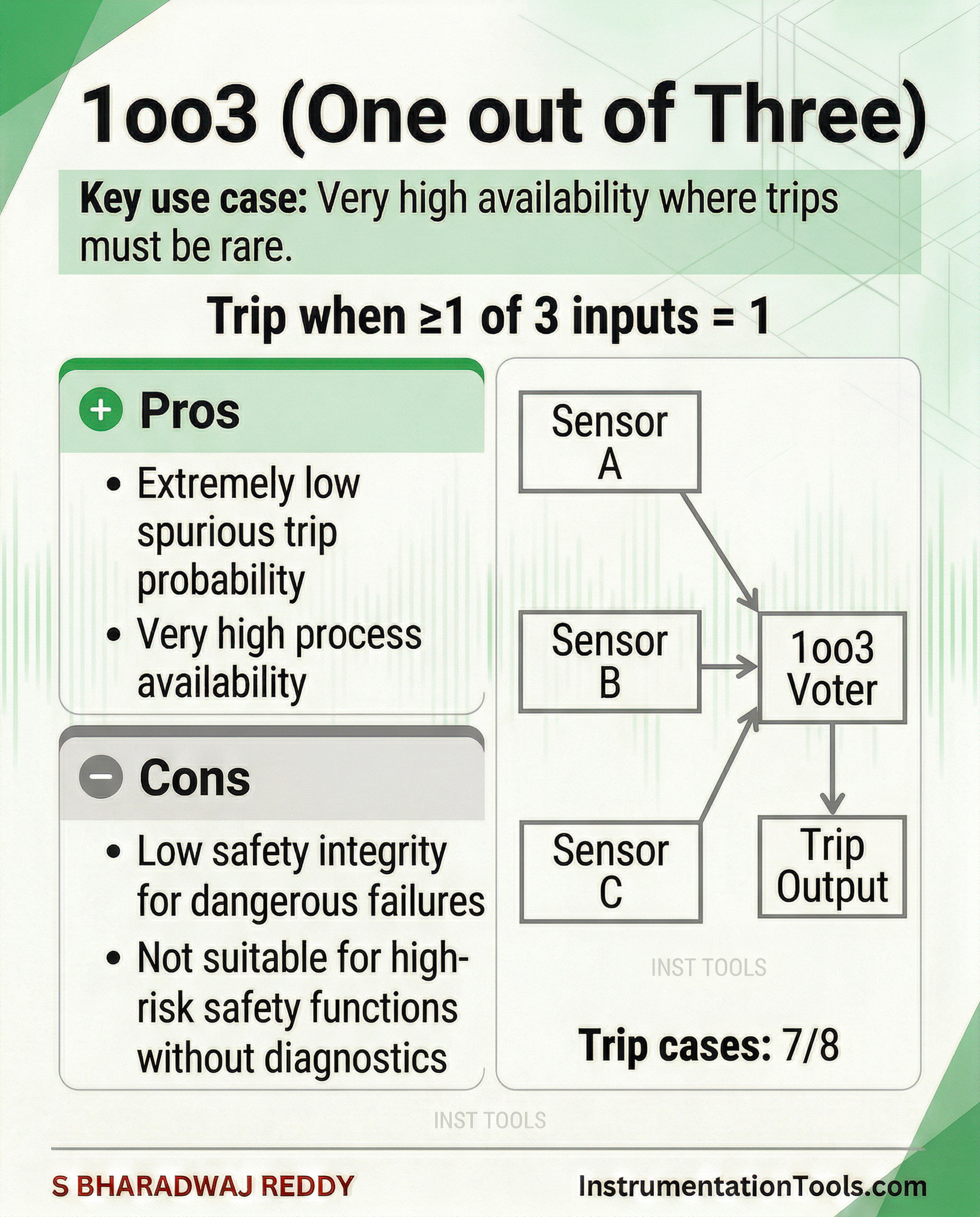
![]() #1oo3 Voting Logic (One out of Three)
#1oo3 Voting Logic (One out of Three)
![]() Trip occurs if any one of three sensors trips
Trip occurs if any one of three sensors trips
![]() Extremely sensitive
Extremely sensitive
![]() Fast hazard detection
Fast hazard detection
![]() Higher false trip probability
Higher false trip probability
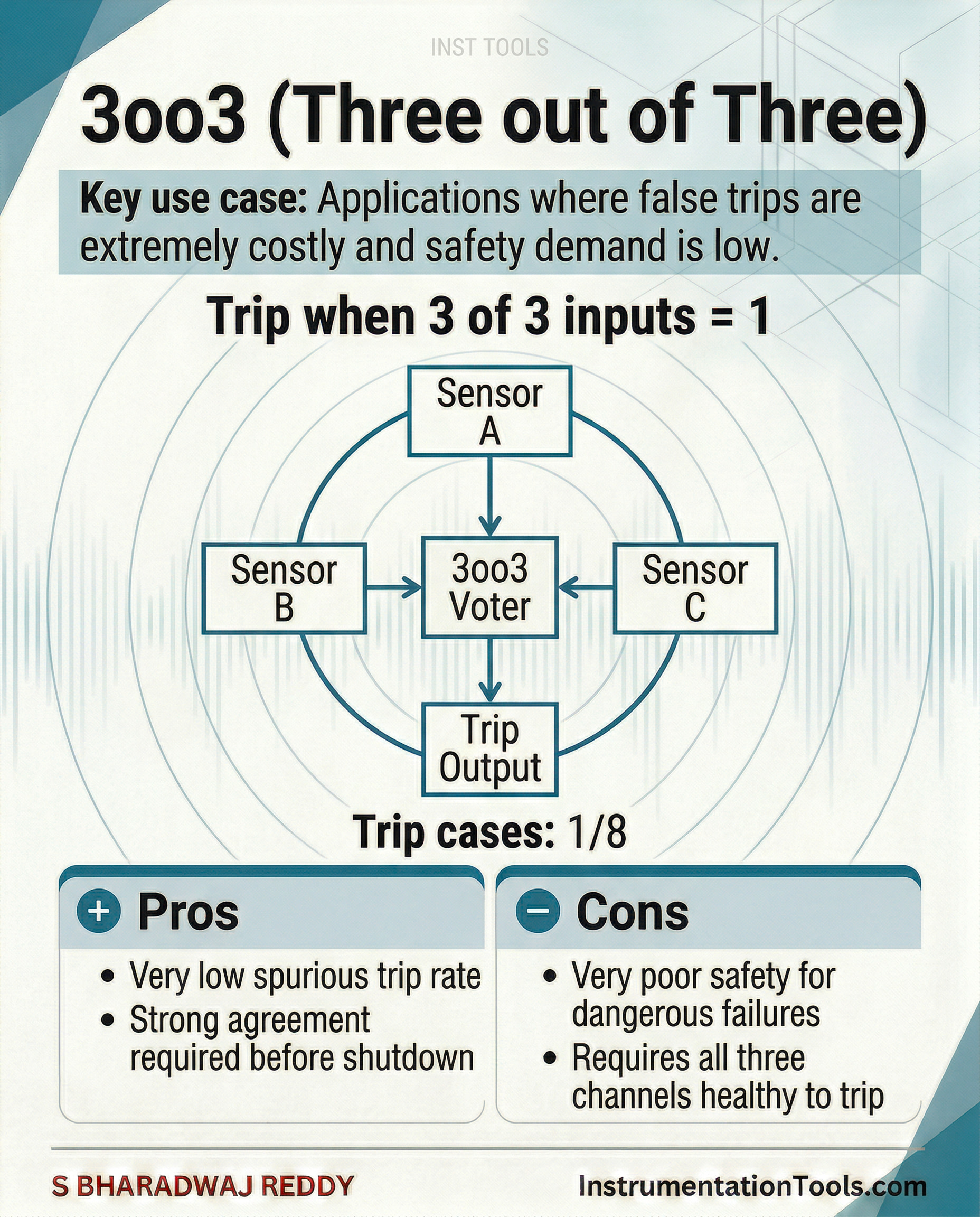
![]() #3oo3 Voting Logic (Three out of Three)
#3oo3 Voting Logic (Three out of Three)
![]() All three sensors must trip
All three sensors must trip
![]() Very stable operation
Very stable operation
![]() Avoids nuisance trips
Avoids nuisance trips
![]() Lower safety sensitivity
Lower safety sensitivity
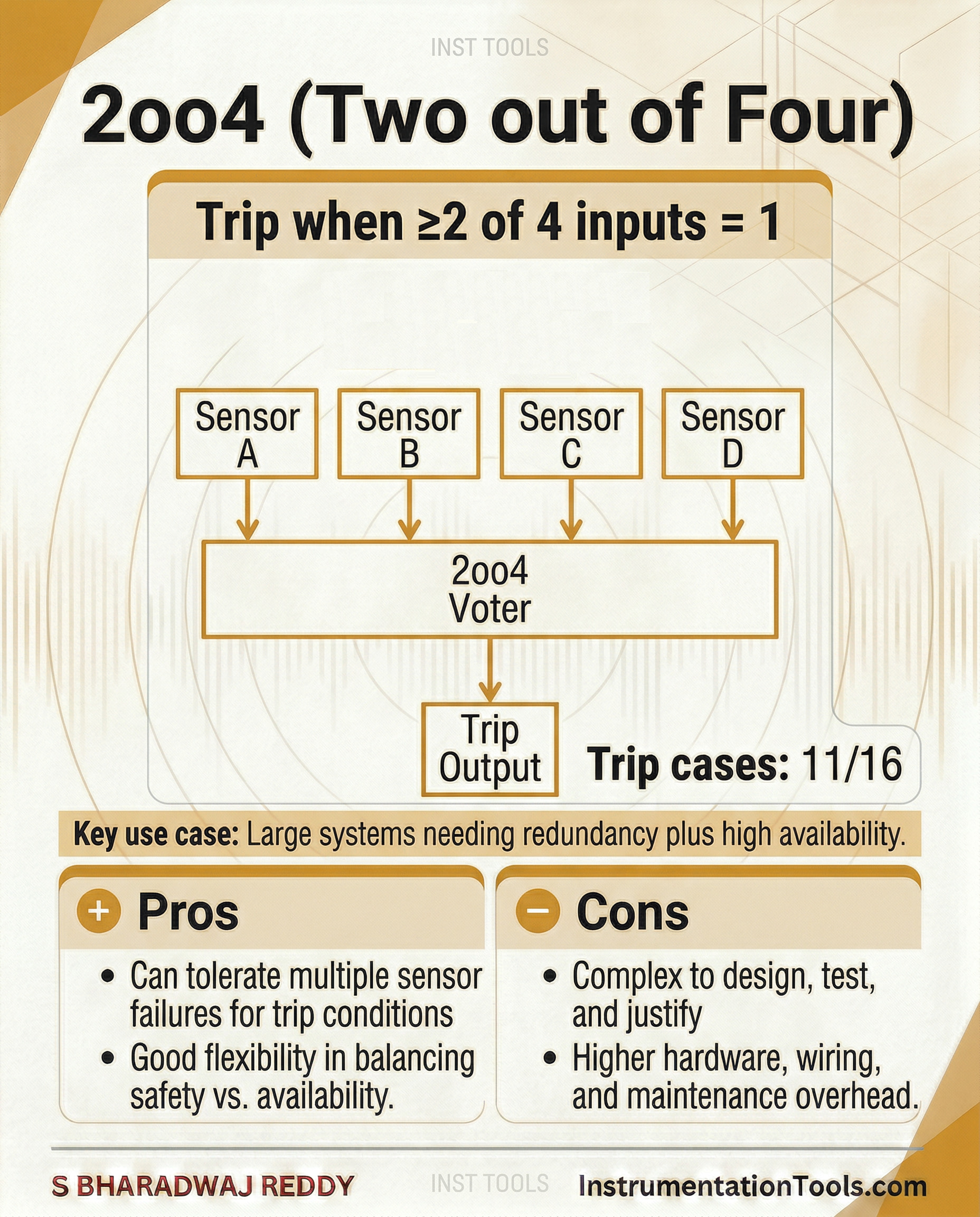
![]() #2oo4 Voting Logic (Two out of Four)
#2oo4 Voting Logic (Two out of Four)
![]() Any two sensors out of four must trip
Any two sensors out of four must trip
![]() Higher redundancy
Higher redundancy
![]() Improved availability
Improved availability
![]() Used in complex protection systems
Used in complex protection systems
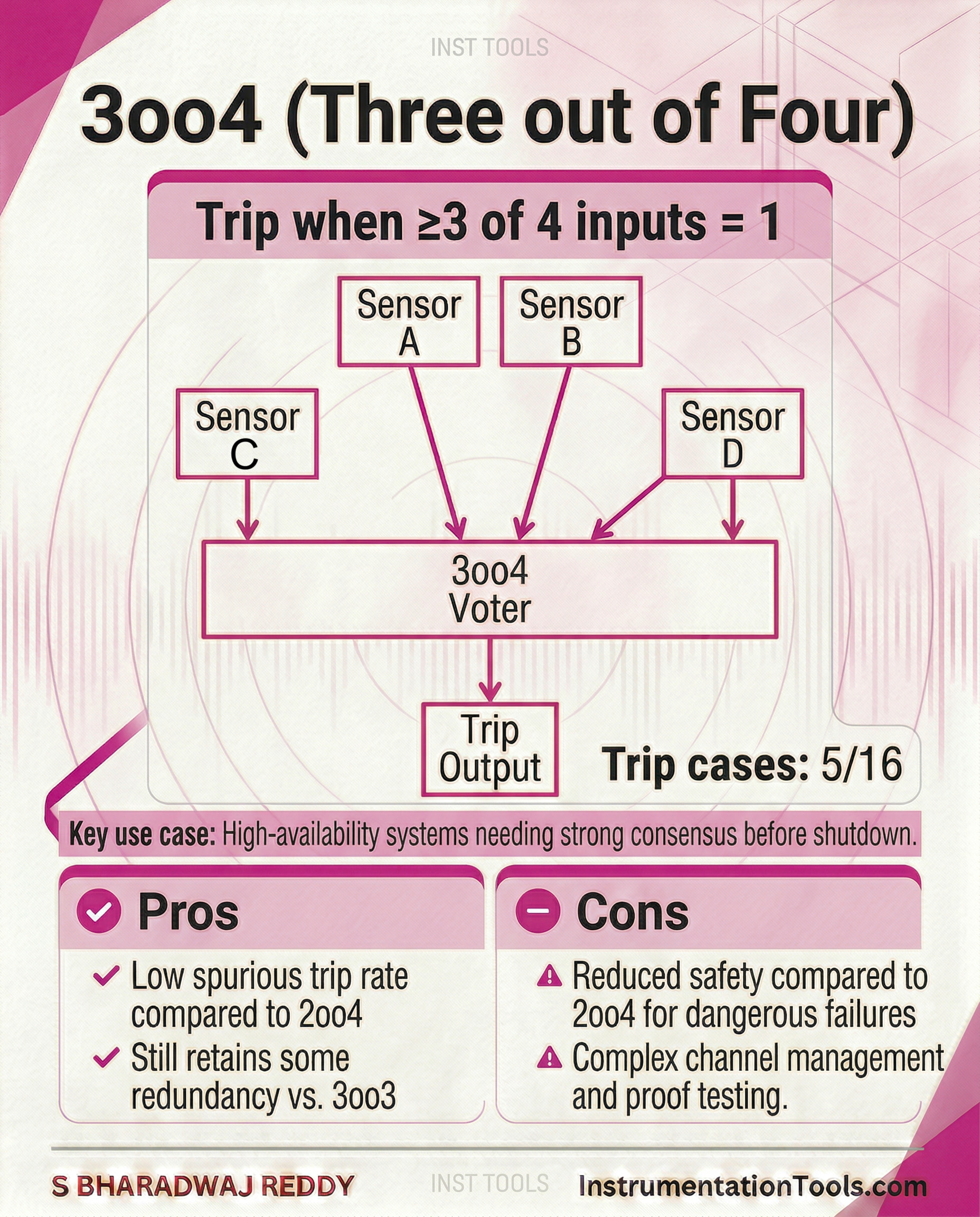
![]() #3oo4 Voting Logic (Three out of Four)
#3oo4 Voting Logic (Three out of Four)
![]() Three sensors must agree
Three sensors must agree
![]() Very high reliability
Very high reliability
![]() Fault tolerant
Fault tolerant
![]() Used in high-risk facilities
Used in high-risk facilities
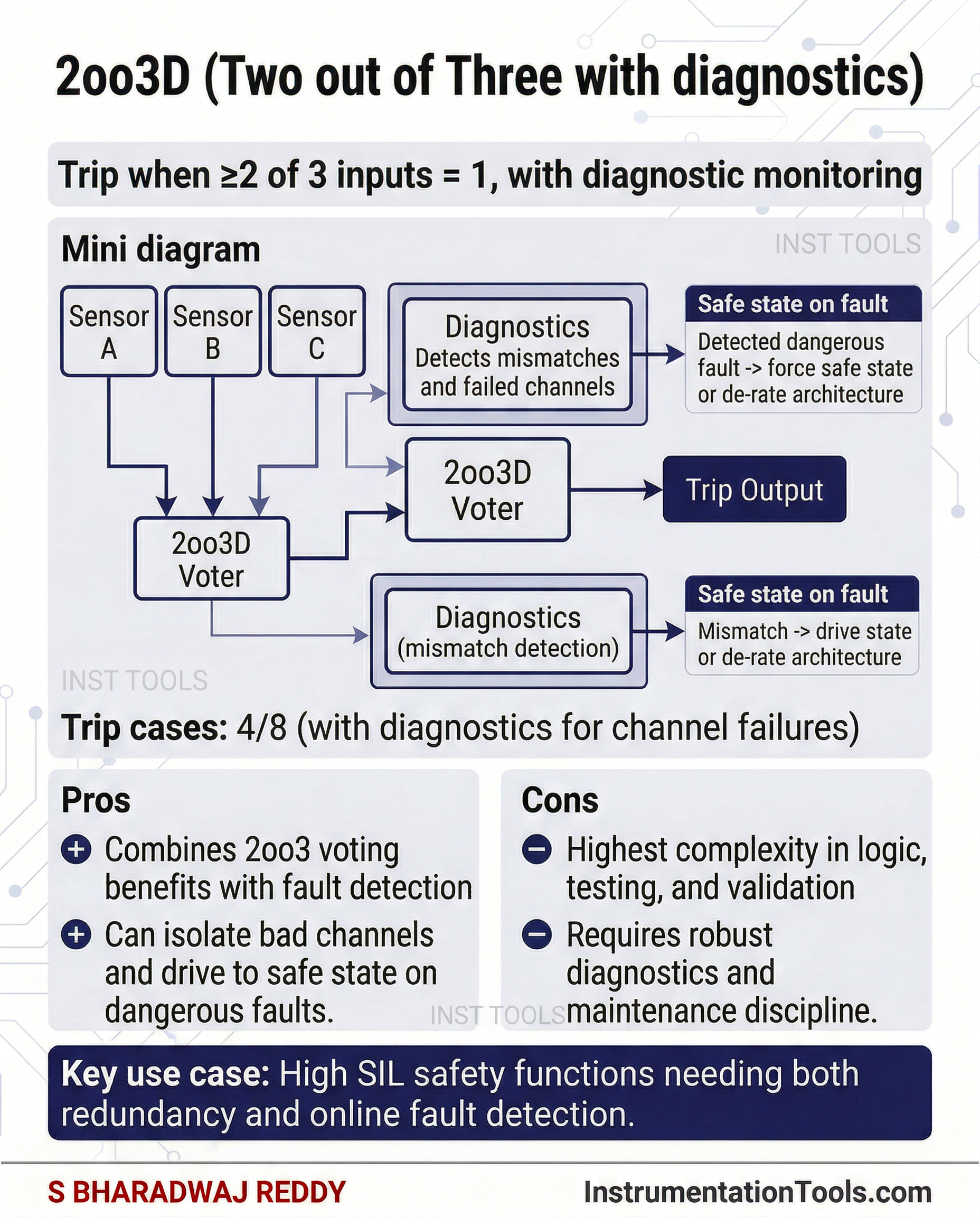
![]() #2oo3D Voting Logic (Diagnostic Voting)
#2oo3D Voting Logic (Diagnostic Voting)
![]() 2 out of 3 with automatic diagnostics
2 out of 3 with automatic diagnostics
![]() Detects faulty sensors
Detects faulty sensors
![]() Maintains protection in degraded mode
Maintains protection in degraded mode
![]() Used in modern SIS architectures
Used in modern SIS architectures
![]() Key Idea
Key Idea
![]() Lower voting requirement → Faster protection
Lower voting requirement → Faster protection
![]() Higher voting requirement → Higher reliability
Higher voting requirement → Higher reliability
![]() Most commonly used in industry?
Most commonly used in industry?
![]() 2oo3 Voting Logic
2oo3 Voting Logic
Because it provides the best balance between safety and plant uptime.
#ProcessSafety #FunctionalSafety #Instrumentation #SIS Automation #ControlSystems #IndustrialSafety ![]()